

Подводный GPS. Испытания новой навигационной системы на длинной базе
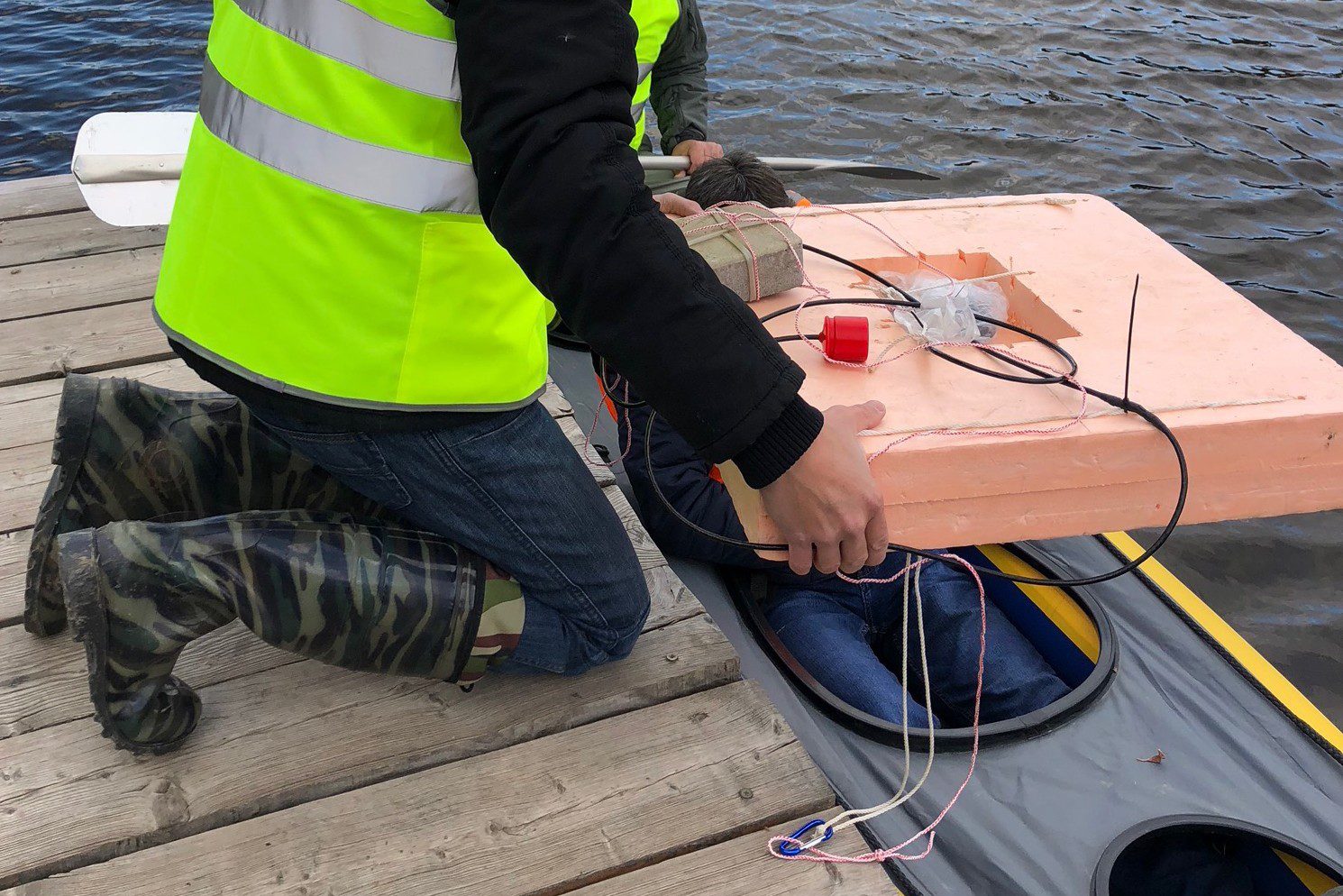
Недавно мы провели испытания новой навигационной системы на длинной базе, а точнее, её макета. Тестирование проходило на Волго-Донском судоходном канале имени В. И. Ленина, гарантированная глубина которого 3,75 м. Позиционировали пингер, который в дальнейшем может быть закреплен на роботе



{kind=link}
{kind=link}
{kind=link}
{kind=link}